
Object Detection Car

When I began to learn how to program, my initial goal was to be able to create a robot: a simple robot that can move around and maybe have some other cool features, like object detection.
I realized that this would not only take me learning code, but also learn about electronics and microcontrollers.
I began to learn about a microcontroller called Arduino and initially created a simple circuit that makes an LED flash when I pressed a button. This simple circuit allowed me to create more complex ones, and I was now able to put my knowledge together to create the robot I always wanted o build.
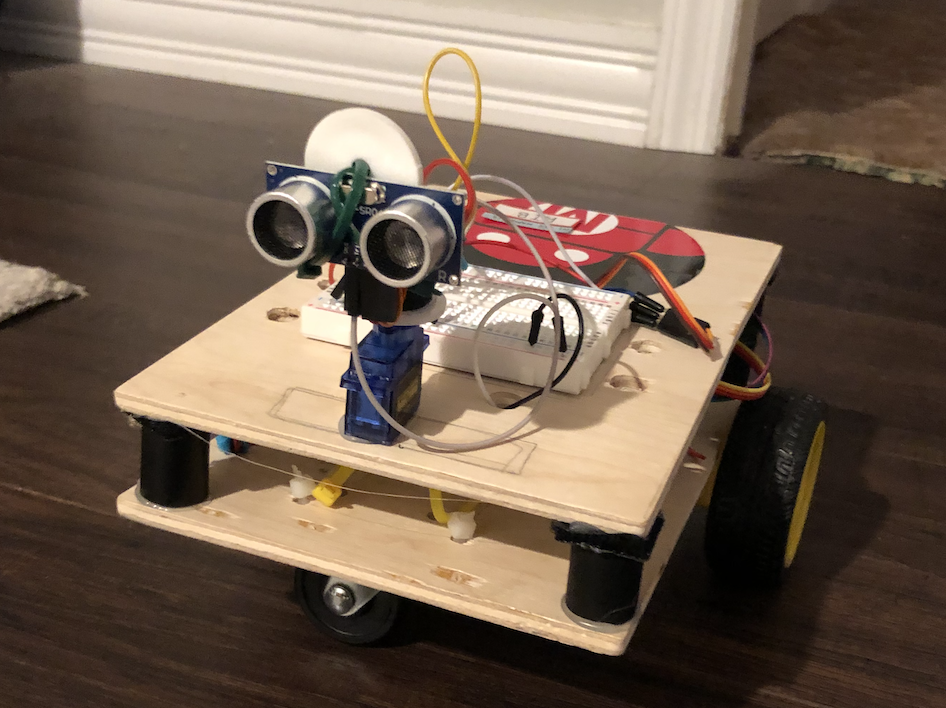
Some of the parts I used were an Arduino Uno for the brains, an Ultrasonic sensor to measure the distance to the nearest obstruction, an H-Bridge Motor Driver to control the wheels, a Servo, wheels, some wires, and a breadboard.
The basic functions of the robot would be the following steps:
- Measure the distance to the nearest object in front of the robot
- Turn the distance sensor to the left and measure, then to the right and measure
- Whichever distance (front, left, right) read the largest, the robot would move in that direction
- Repeat
This project taught me a lot about the inner workings and connection between hardware and software.




















